
Abstract
This lecture overviews Robot Kinematics and Dynamic Modeling that has many applications in robotic control. It covers the following topics in detail: Robot Kinematics: Kinematic Equations, Forward kinematics, Inverse kinematics, Rotations. Dynamic Modeling, Robot Dynamics. Foundations from Classical Mechanics, Newton-Euler Method, Lagrange Method.
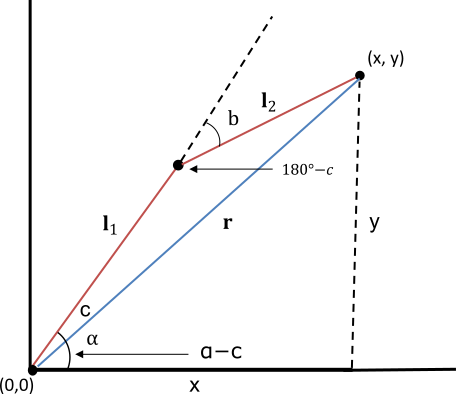
Inverse kinematics of a two-link arm.
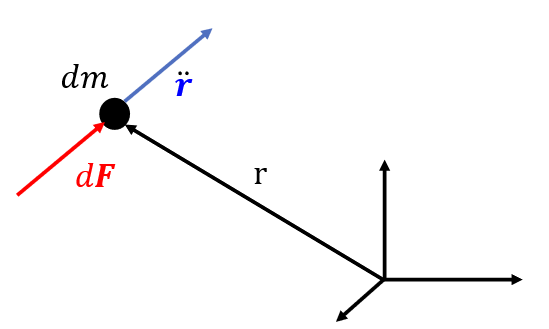
Force acting on single particle.
Robot-Kinematic-and-Dynamic-Modeling-v1.2.5-Summary