
Abstract
This lecture overviews Introduction to ROS that has many applications in robotics and autonomous systems development. It covers the following topics in detail: ROS Distributions, HW, installation, architecture, master/nodes, communication (messages/topics), ROS tools (Catkin, rqt_graph, OpenCV Library, Gazebo).
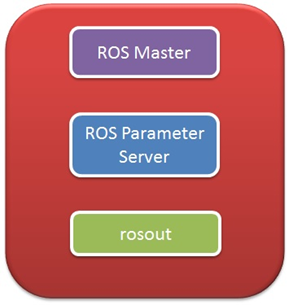
ROS master.

3 drone mission simulation in ROS and Gazebo.
Introduction to ROS v1.2 - Summary