
Abstract
Stereoscopic and multiview imaging will be explored in depth, as they have tremendous applications in many applications, ranging from autonomous car/drone/robot/vessel vision to Surveying Engineering to Medical Imaging. Focus will be mainly on stereoscopic vision, geometry and camera technologies. Epipolar Geometry, Essential and Fundamental matrix, Stereo rectification are detailed. Subsequently, the main methods of disparity estimation and 3D scene reconstruction from stereoscopic video will be described, together with feature search and matching. Multiview imaging will be overviewed.
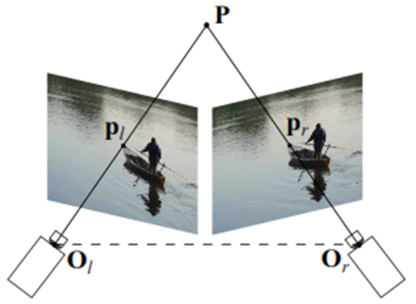
Stereo vision.
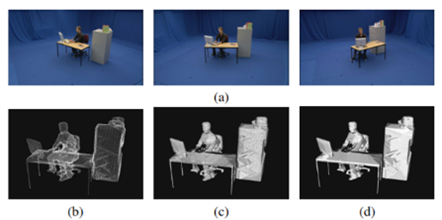
Multiview vision.
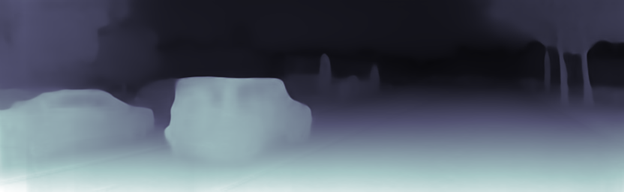
Depth image from stereo.
Stereo-and-Multiview-Imaging-v3.3-Summary