
LECTURE 5: Structure from Motion
Saturday 9th May 2020, 11:00-11:45 EEST and repeated 20:00-20:45 EEST
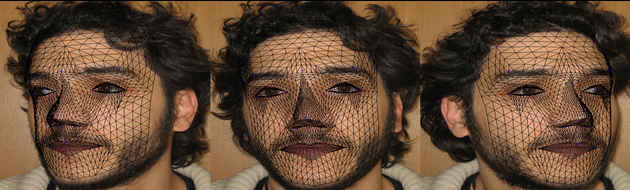
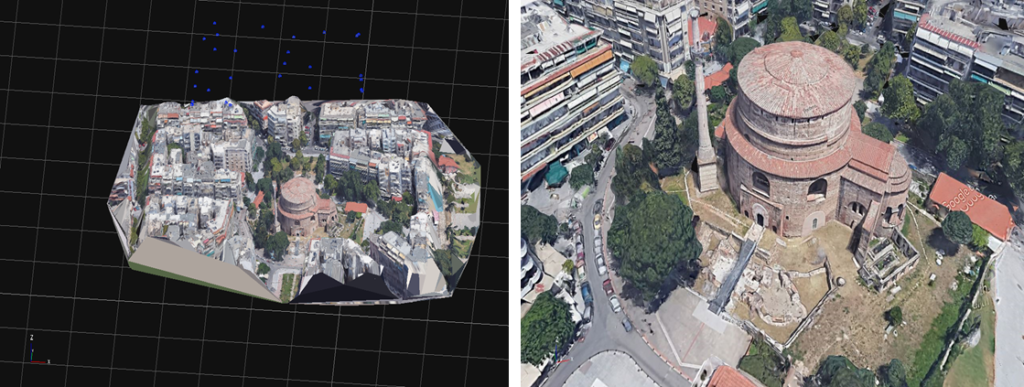
Summary: Image-based 3D Shape Reconstruction, Stereo and multiview imaging principles. Feature extraction and matching. Triangulation and Bundle Adjustment. Mathematics of structure from motion. UAV image capturing. Optimal UAV flight trajectory/flight height/viewing angle/image overlap ratio. Pre/post-processing for 3D reconstruction: flat surface smoothing/mesh modification/isolated point removal. Structure from motion applications: 3D face reconstruction from uncalibrated video. 3D landscape reconstruction. 3D building/monument reconstruction and modeling.
Sample lecture material
– sample slides DOWNLOAD
Related Literature:
- Pitas, “Computer vision”, Createspace/Amazon, in press.
- R.Szelinski, “ Computer Vision ” , Springer 2011
- Hartley R, Zisserman A. , “ Multiple view geometry in computer vision” . Cambridge university press; 2003.
- Davies, E. Roy. “Computer vision: principles, algorithms, applications, learning ”. Academic Press, 2017
Lecture 6: 2D convolution and correlation
Saturday 9th May 2020, 11:45-12:30 EEST and repeated 20:45-21:30 EEST
Summary: 2D convolutions play an extremely important role in machine learning, as they form the first layers of Convolutional Neural Networks (CNNs). They are also very important for computer vision (template matching through correlation, correlation trackers) and in image processing (image filtering/denoising/restoration). 3D convolutions are very important for machine learning (video analysis through CNNs) and for video filtering/denoising/restoration. 1D convolutions are extensively used in digital signal processing (filtering/denoising) and analysis (also through CNNs)
Therefore, 2D convolution and correlation algorithms are very important both for machine learning and for signal/image/video processing and analysis. As their computational complexity is of the order O(N^4), their fast execution is a must.
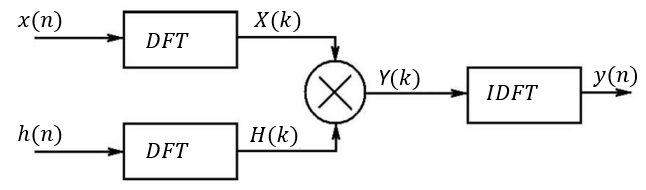
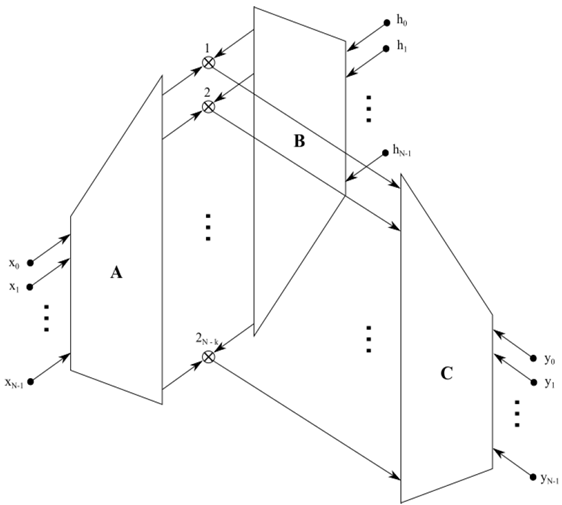
This lecture will overview 1D/2D linear and cyclic convolution. Then it will present their fast execution through FFTs, resulting in algorithms having computational complexity of the order O(Nlog2N), O(N^2log2N) for 1D and 2D convolutions respectively. Parallel block-based 2D convolution/calculation methods will be overviewed. The use of 2D convolutions in Convolutional Neural Networks will be presented.
Sample lecture material
– sample slides DOWNLOAD
Related Literature
- I. Pitas, Digital Image Processing Algorithms and Applications, J. Wiley, 2000.
- I. Pitas, “Digital video processing and analysis ” , China Machine Press, 2017 (in Chinese).
- I. Pitas, “Digital Video and Television ” , Createspace/Amazon, 2013.
- I. Pitas, “Computer vision”, Createspace/Amazon, in press.
LECTURER

Prof. Ioannis Pitas (IEEE fellow, IEEE Distinguished Lecturer, EURASIP fellow) received the Diploma and PhD degree in Electrical Engineering, both from the Aristotle University of Thessaloniki, Greece. Since 1994, he has been a Professor at the Department of Informatics of the same University. He served as a Visiting Professor at several Universities.
His current interests are in the areas of image/video processing, machine learning, computer vision, intelligent digital media, human centered interfaces, affective computing, 3D imaging and biomedical imaging. He has published over 1138 papers, contributed in 50 books in his areas of interest and edited or (co-)authored another 11 books. He has also been member of the program committee of many scientific conferences and workshops. In the past he served as Associate Editor or co-Editor of 9 international journals and General or Technical Chair of 4 international conferences. He participated in 70 R&D projects, primarily funded by the European Union and is/was principal investigator/researcher in 42 such projects. He has 30000+ citations to his work and h-index 81+ (Google Scholar).
Prof. Pitas leads the big European H2020 R&D project MULTIDRONE: https://multidrone.eu/. He is chair of the Autonomous Systems initiative https://ieeeasi.signalprocessingsociety.org.
Relevant links:
http:// https://scholar.google.gr/citations?user=lWmGADwAAAAJ&hl=en