
10th June 2020
13. Object tracking 17:00-17:45 EEST
14. Localization and mapping 17:45-18:30 EEST
LECTURE DESCRIPTION
LECTURE 13: Object tracking
Wednesday 10th June 2020 , 17:00-17:45 EEST
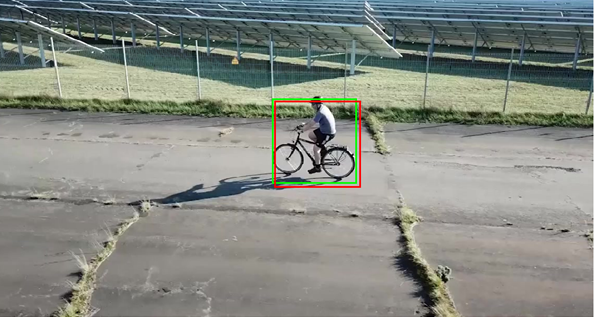
Summary: Object/target tracking is a crucial component of many computer vision systems. Many approaches on face/object tracking in videos will be overviewed, notably based on feature point tracking, or on color/texture target descriptors. Furthermore, this lecture will focus on video tracking methods using correlation filters or convolutional neural networks. Video trackers that are capable of achieving real time performance for long-term tracking on a UAV platform will be overviewed as well.

Sample lecture material
– sample slides DOWNLOAD
Related Literature:
- Henriques, J. F., Caseiro, R., Martins, P., & Batista, J. (2014). High-speed tracking with kernelized correlation filters. IEEE transactions on pattern analysis and machine intelligence, 37(3), 583-596.
- Karakostas, I., Mygdalis, V., Tefas, A., & Pitas, I. (2019, September). On Detecting and Handling target occlusions in Correlation-filter-based 2D tracking. In 2019 27th European Signal Processing Conference (EUSIPCO) (pp. 1-5). IEEE.
Lecture 14: Localization and mapping
Wednesday 10th June 2020 , 17:45-18:30 EEST
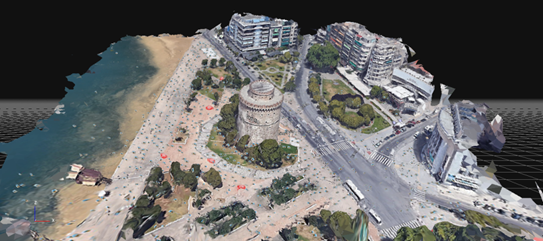
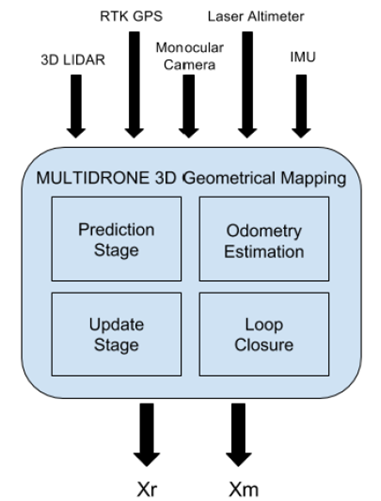
Summary: This lecture includes the essential knowledge about how we obtain/get 2D and/or 3D maps that robots/drones need, taking measurements that allow them to perceive their environment with appropriate sensors. Semantic mapping includes how to add semantic annotations to the maps such as POIs, roads and landing sites. The section Localization is exploited to find the 3D drone or target location based on sensors using specifically Simultaneous mapping and localization (SLAM). Finally, the drone localization fusion is presented that improves localization and mapping accuracy by exploiting synergies between different sensor data.
Sample lecture material
– sample slides DOWNLOAD
Related Literature
- Saputra, M.R.U., Markham, A. and Trigoni, N., “Visual SLAM and structure from motion in dynamic environments: A survey”. ACM Computing Surveys (CSUR), 51(2), pp.1-36, 2018.
- Mur-Artal, J. D. Tardós, “ORB-SLAM2: An open-source SLAM system for monocular, stereo, and RGB-D cameras”, IEEE Transactions on Robotics, 33(5), 1255-1262, 2017.
LECTURER

Prof. Ioannis Pitas (IEEE fellow, IEEE Distinguished Lecturer, EURASIP fellow) received the Diploma and PhD degree in Electrical Engineering, both from the Aristotle University of Thessaloniki, Greece. Since 1994, he has been a Professor at the Department of Informatics of the same University.
His current interests are in the areas of machine learning, computer vision, intelligent digital media, human centered interfaces, affective computing, 3D imaging and biomedical imaging. He has published over 860 papers, contributed in 44 books in his areas of interest and edited or (co-)authored another 11 books. He has also been member of the program committee of many scientific conferences and workshops. In the past he served as Associate Editor or co-Editor of 9 international journals and General or Technical Chair of 4 international conferences. He participated in 69 R&D projects, primarily funded by the European Union and is/was principal investigator/researcher in 41 such projects.
He has 31000+ citations to his work and h-index 83+ (Google Scholar)
Prof. Pitas lead the big European H2020 R&D project MULTIDRONE: https://multidrone.eu/ and is principal investigator (AUTH) in H2020 projects Aerial Core and AI4Media. He is chair of the Autonomous Systems initiative https://ieeeasi.signalprocessingsociety.org/.
Lecturing record of Prof. I. Pitas: He was Visiting/Adjunct/Honorary Professor/Researcher and lectured at several Universities: University of Toronto (Canada), University of British Columbia (Canada), EPFL (Switzerland), Chinese Academy of Sciences (China), University of Bristol (UK), Tampere University of Technology (Finland), Yonsei University (Korea), Erlangen-Nurnberg University (Germany), National University of Malaysia, Henan University (China). He delivered 90 invited/keynote lectures in prestigious international Conferences and top Universities worldwide. He run 17 short courses and tutorials on Autonomous Systems, Computer Vision and Machine Learning, most of them in the past 3 years in many countries, e.g., USA, UK, Italy, Finland, Greece, Australia, N. Zealand, Korea, Taiwan, Sri Lanka, Bhutan.
Relevant links:
http://https://scholar.google.gr/citations?user=lWmGADwAAAAJ&hl=en