
Abstract
Autonomous marine vessels can be described as surface (boats, ships) and underwater ones (submarines). They have many applications in marine transportation, marine/submarine surveillance and many challenges in environment perception/mapping and vehicle control, to be reviewed in this lecture. The following topics are covered: Autonomous Surface Vessel (ASV) Applications, ASV types, ASV autonomy types, Basic elements of ASV, Sensor technologies for Situational Awareness (e.g., collision avoidance), marine SA sensors, Classification of ASV GNU techniques, ASV Kinematic model, ASV dynamic model.
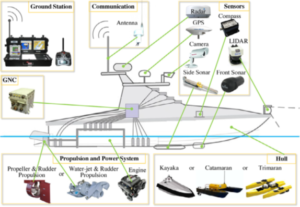
ASV architecture.
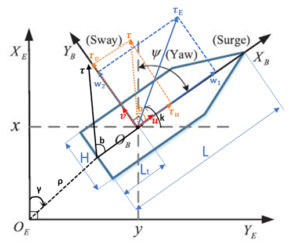
ASV dynamic model.
Autonomous Surface Vessels summary